






Results
The sensor can scan objects from about 40cm out to a few meters, depending on the reflectivity of the object. Each scan takes about 12 seconds.
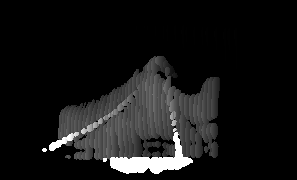
Here's a few objects that we found lying around. Distance is related to the brightness of a pixel. Thus, close objects are white and far away objects are black.
|  |
| Side view of a shoe. Notice how you can see the individual shoelaces that are in front. | Thumbs up! |
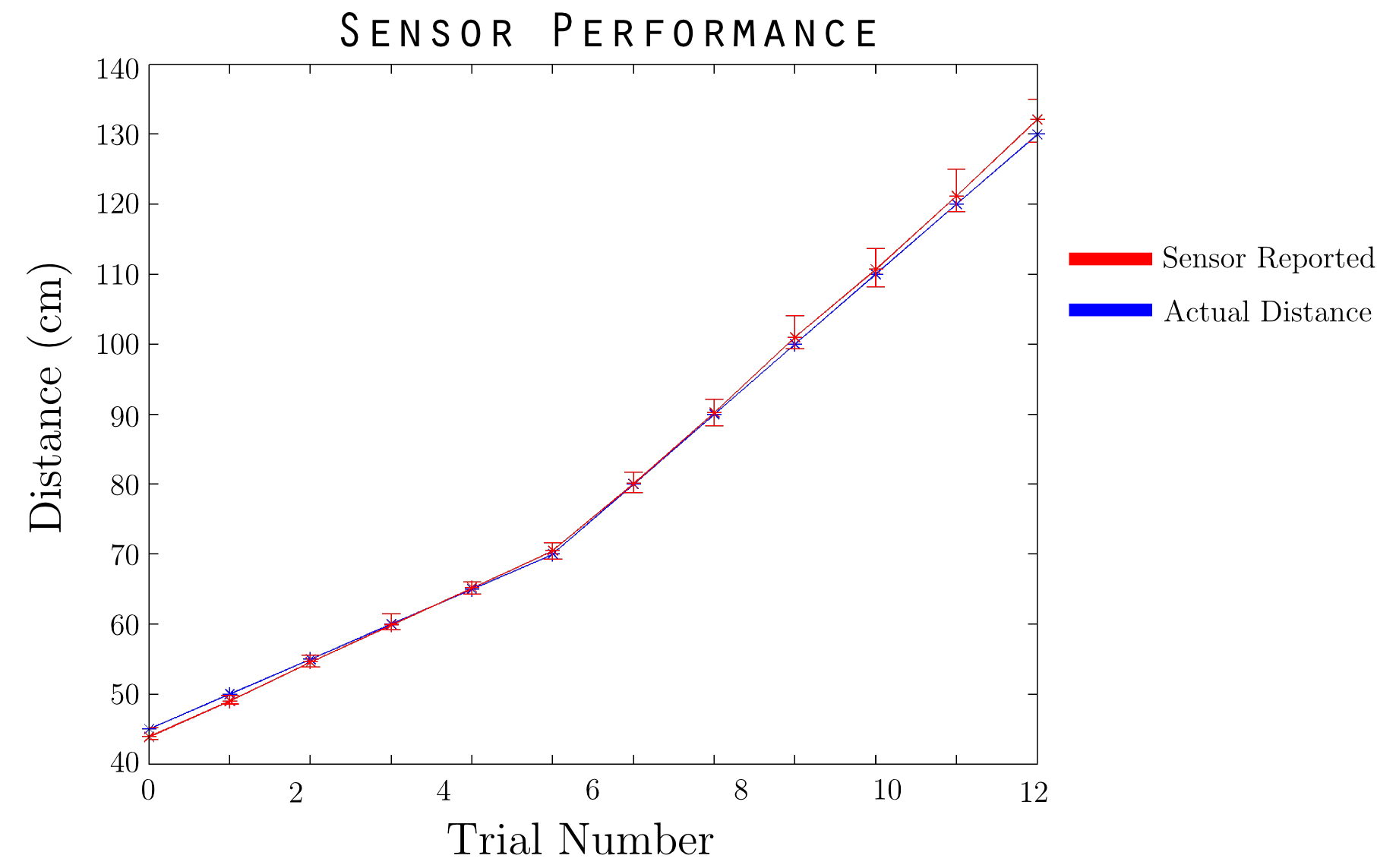
To evaluate the accuracy of the sensor we used a flat object at different distances away and recorded what the sensor reported the distance to be. During each trail we performed a full angle sweep of the object and recorded the maximum, minimum, and average values reported. Here the blue line is the actual distance which is closely tracked by the red line (reported distance). The error bars indicate the maximum and minimum values the sensor reported at that range. Clearly, the active stereo system is very accurate throughout its range. The maximum deviation from the actual value was 3.6cm and the maximum deviation of the average was only 2.1cm.
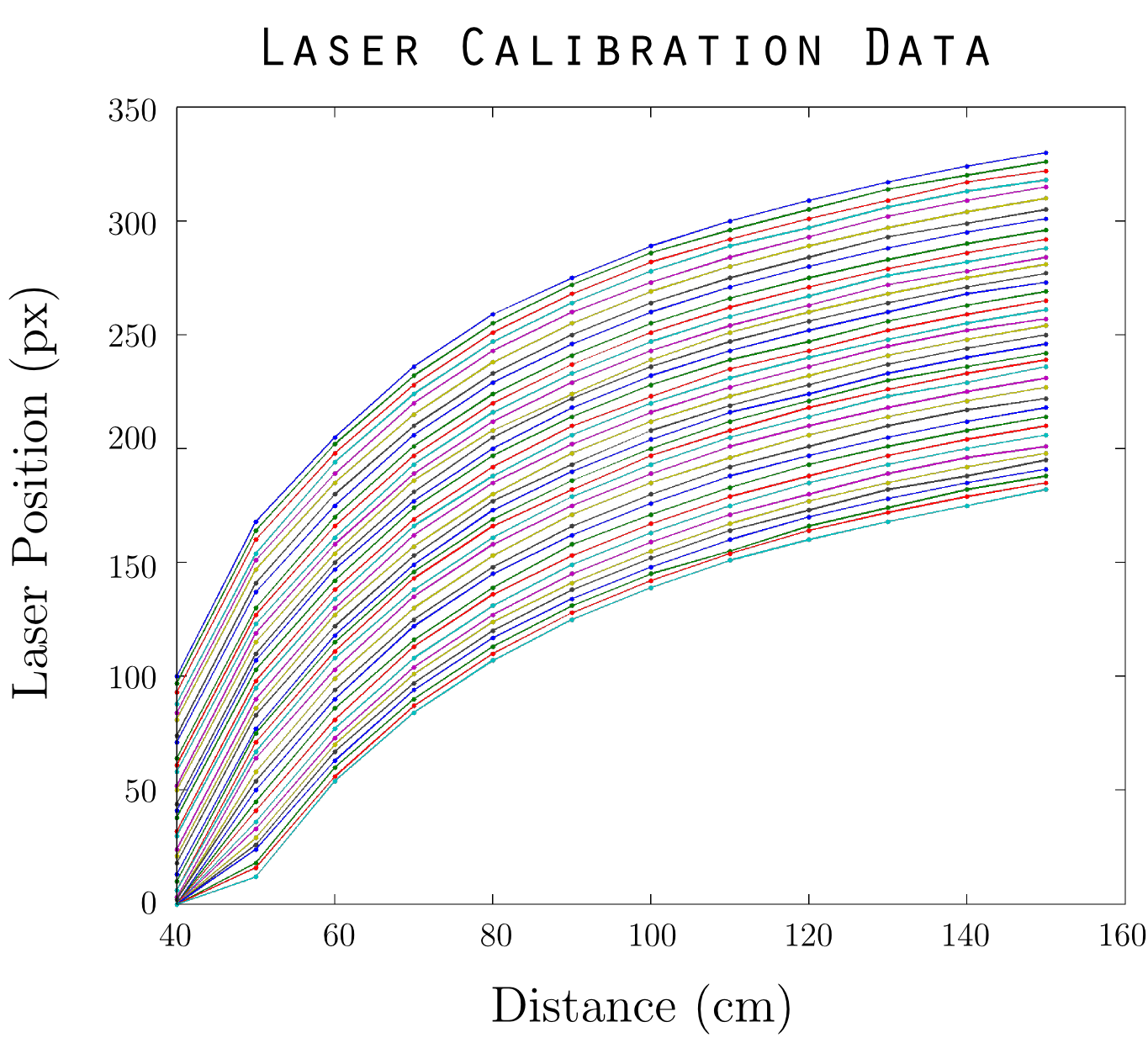
Laser Calibration
The different colored lines indicate calibration data at different mirror angles. As the object gets farther from the camera the amount that it moves towards the center of the image decreases, lowering resolution. This makes sense because at infinity, the distance between the camera and laser pointer is equivalent to zero. The abnormal values in the bottom left of the plot indicate points where the laser was not visible.